微信扫码咨询
微信扫码咨询
全国咨询服务热线:
13922856097

联系我们

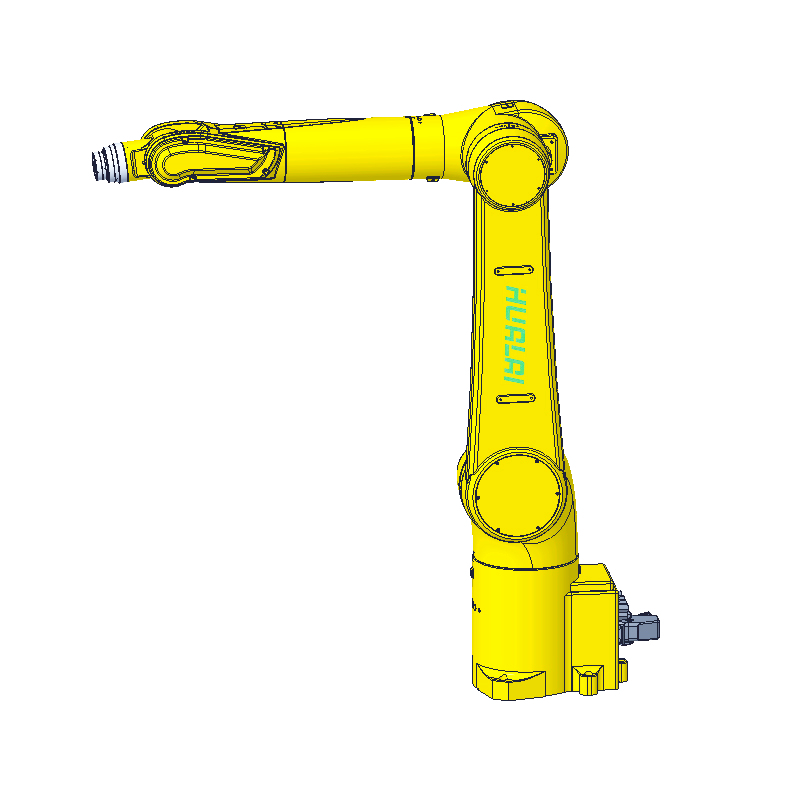
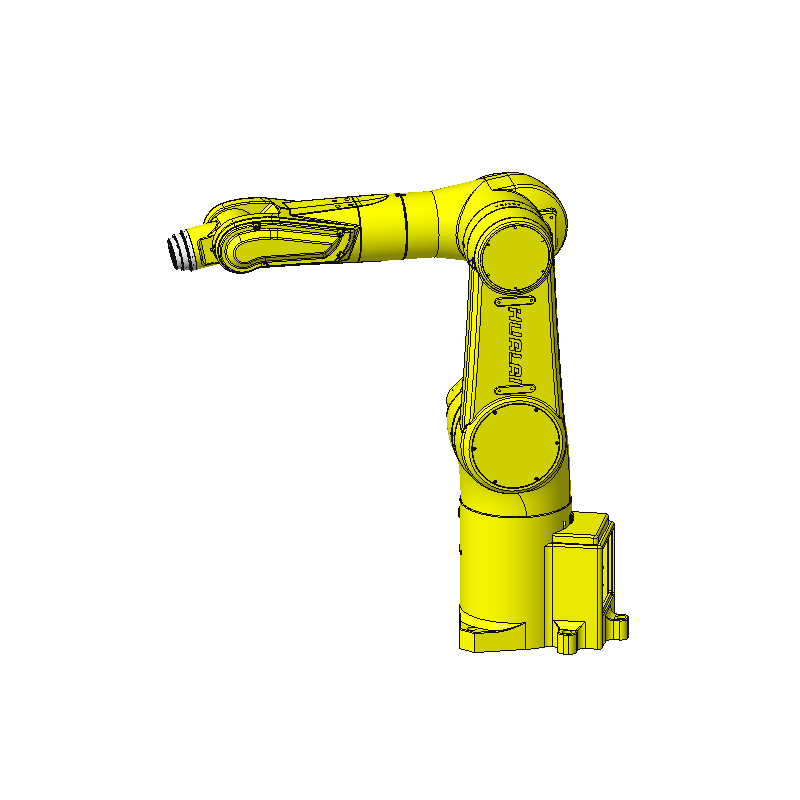
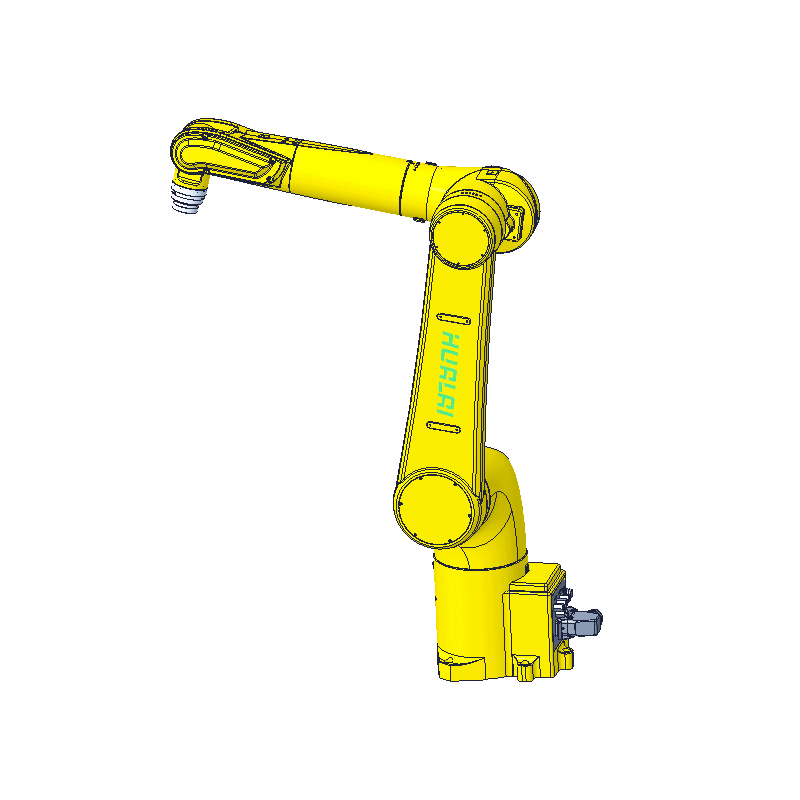
HL-QX9005系列轻型协作机器人
采用领先的Ethercat总线结构,全闭环关节力矩反馈,图形化编程,零力示教,丝滑拖拽,实时性强、稳定性高,全面提升在各场景的生产性能,有效提升生产效率;
开发的开放平台以及实时控制系统,集全面升级的柔性、安全性、易用性、灵活性为一身,支持ROS二次开发,支持多种通讯协议方式,全面赋能各行业应用;

型号 | HL-QX9005 | |
最大负载 | 5KG | |
工作半径 | 900mm | |
运动轴数 | 6轴 | |
重复定位精度 | ±0.02mm | |
最大工作范围
| A1轴 | ±175° |
A2轴 | ﹢85°/-265° | |
A3轴 | ±160° | |
A4轴 | ﹢85°/-265° | |
A5轴 | ±175° | |
A6轴 | ±175° | |
最大速度 | A1轴 | 180°/sec |
A2轴 | 180°/sec | |
A3轴 | 180°/sec | |
A4轴 | 180°/sec | |
A5轴 | 180°/sec | |
A6轴 | 180°/sec | |
典型TCP速度 | 1m/s | |
防护等级 | IP54 | |
噪音 | <65db | |
安装方向 | 任意方向 | |
I/O端口 | 数字输入 (DI) 2 数字输出 (DO) 2 模拟输入(AI) 2 模拟输出(AO) 2 高速脉冲输入 2 | |
工具I/O电源 | 24V/1.5A | |
底座直径 | 149mm | |
整机重量 | ≈22kg(不含线) | |
工作温度 | 0-45℃ | |
工作湿度 | 90%RH(non-condensing) | |
设备材料 | 铝、钢 | |
标配通讯 | I/O、TCP/IP、Modbus_TCP/RTU | |
可选通讯 | CC-Link、Profinet、Ethernet/IP、EtherCAT | |
通讯板卡 | MiniPCI Express- 实时以太网 PC板卡 | |
软件开发包 | C#/C++/Python/ROS/ROS2 | |